
Abstract
This International Programme on Landslide (IPL) Project 202 paper presents a scalable remote piloted aircraft system (RPAS) platform that streamlines unoccupied aerial vehicle (UAV) flight operations for data capture, cloud processing and image rendering to inventory and monitor slow-moving landslides along the national railway transportation corridor in southwestern British Columbia, Canada. Merging UAV photogrammetry, ground-based real-time kinematic global navigation satellite system (RTK-GNSS) measurements, and satellite synthetic aperture radar interferometry (InSAR) datasets best characterizes the distribution, morphology and activity of landslides over time. Our study shows that epochal UAV photogrammetry, benchmarked with periodic ground-based RTK-GNSS measurements and satellite InSAR platforms with repeat visit times of weeks (e.g., RADARSAT-2 and SENTINEL-1) to days (e.g. RADARSAT Constellation Mission) provides rapid landslide monitoring capability with cm-scale precision and accuracy.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others
Keywords
- Landslides
- Remote piloted aircraft system
- Unoccupied aerial vehicle
- Photogrammetric change-detection
- Satellite synthetic aperture radar interferometry
- Real-time kinematic global navigation satellite systems
1 Introduction
Unoccupied aerial vehicle (UAV) photogrammetry is increasingly incorporated into local, regional and national geohazard monitoring protocols for vulnerable economic infrastructure and communities (Casagli et al. 2017; Turner et al. 2015; Rossi et al. 2018; Sestras et al. 2021). Optical UAV imagery and light detection and ranging (LiDAR) data captured during field surveys are desktop-processed to generate point cloud digital surface models (DSMs) and digital elevation models (DEMs). UAV photogrammetry, when benchmarked with satellite synthetic aperture radar interferometry (InSAR) and ground-based real-time kinematic (RTK) global navigation satellite system (GNSS) measurements, provides cm-scale resolution geospatial data for geohazard mapping and landscape change-detection monitoring (Booth et al. 2013; Handwerger et al. 2021; Huntley et al. 2021a, b, c a, b).
1.1 Monitoring for Landslide Hazards, Change-Detection, Disaster-Risk Reduction
From environmental, logistical and transportation safety perspectives, rapidly deployable UAVs offer a low-carbon footprint alternative to geological mapping using fixed-wing aircraft and helicopters, particularly along linear transportation routes and around remote northern communities. In Canada, high-resolution photogrammetry and change-detection monitoring (cf. Huntley et al. 2021a, b) requires a UAV with an optical sensor payload in excess of 250 g, subscription-based commercial software for flight plans and data acquisition, along with trained and certified operators and observers following strict Transport Canada (TC) regulations for operating remote piloted aircraft systems (RPAS). The number of UAVs and appropriately trained field operatives available limits the duration and spatial coverage of surveys, and generic utility as a geohazard monitoring tool.
In this paper, we apply an easily scalable RPAS platform, developed by Spexi Geospatial Inc. (www.fly.spexigeo.com [URL 2022]), to landslide inventory mapping and change-detection monitoring in western Canada. This RPAS streamlines UAV flight operations for data capture, cloud processing and image rendering to aid in the inventory and monitoring of slow-moving landslides along a strategically important section of the national railway network traversing the Thompson River valley in south-central British Columbia (BC) (Fig. 1a). Combining field-based landslide investigation with multi-year geospatial and in-situ time-series monitoring leads to a more resilient railway national transportation network able to meet Canada’s future socioeconomic needs, while ensuring protection of the environment and resource-based communities from landslides related to extreme weather events and climate change.

Study area, showing landslides in relation to national railway infrastructure: a southwestern British Columbia showing major transportation corridors. b Historical activity of slow-moving landslides of the Thompson with potential to negatively impact national railway infrastructure, operational services, the environment, local communities, and national economy (after Clague and Evans 2003). c Landslides of concern determined from InSAR results for the Thompson River valley, showing CN and CP tracks (solid black lines); RADARSAT-2 average linear displacement rate rastered at 3 cm year−1, with purple polygons delimiting 4-sigma confidence levels (modified from Huntley et al. 2021c). CN—Canadian National Railways; CP—Canadian Pacific Railways; TR—Thompson River; FR—Fraser River
1.2 Study Area
Landslides along a ten-kilometre stretch of the Thompson River valley between Ashcroft and Spences Bridge (Fig. 1b) have negatively impacted critical railway infrastructure, arable land, fisheries, and other natural resources since the 1880s (Fig. 1b). In the late nineteenth century, prehistoric mass movements reactivated as sudden onset, rapid retrogressive flow-slides during the fall and winter months at a time when terraces were intensively irrigated for agricultural land use, and toe slopes were incised and over-steepened during railway construction (Stanton 1898; Clague and Evans 2003).
Field-based geological and geophysical mapping, combined with InSAR analyses (Fig. 1c), and in situ semi-continuous monitoring, provide insight into landslide activity, deformation mechanisms, and potential acceleration triggers along this critical section of the national railway transportation corridor (Bunce and Chadwick 2012; Journault et al. 2018; Huntley et al. 2019a, b; Holmes et al. 2020). Each of these techniques record increased landslide activity in winter, when river and groundwater levels are lowest (Macciotta et al. 2014; Hendry et al. 2015; Schafer et al. 2015; Journault et al. 2018). Permanent GNSS monuments on Ripley Landslide record cumulative annual displacement on the order of 10 cm year−1 to 20 cm year−1, peaking in winter (Bunce and Chadwick 2012; Macciotta et al. 2014; Hendry et al. 2015; Huntley et al. 2021a).
RADARSAT-2 and SENTINEL-1 InSAR results from 2013 to 2020 indicate similar magnitudes and spatial–temporal patterns of displacement (Journault et al. 2018; Huntley et al. 2021b, c). From south to north along the railway transportation corridor, these include the following landslides of concern with an average 1D line-of-sight (LoS) displacement greater than 3 cm year−1: Ripley Landslide, Red Hill Slide, South Slide, North Slide, and Goddard Slide (Fig. 1c). Regions of highest landslide activity intersecting with railway infrastructure correlate with cutbank erosion and channel bed scour on the outside bends of the river.
The economic importance of this transportation corridor, along with the need to understand and manage the safety risk related to the landslides that threaten the route, mandate the Thompson River valley a research priority for NRCAN and the GSC. As part of the International Consortium on Landslides (ICL) International Programme on Landslides (IPL) Project 202, landslides in the Thompson River valley serve as field laboratories to test and compare the reliability and effectiveness of different static, dynamic, and real-time monitoring technologies (e.g., Huntley et al. 2017; Huntley et al. 2019a, b).
Multiple landslides were surveyed each day, depending on areal extent of the flight plans, weather conditions, and time of day (Fig. 2). Flights were undertaken on October 20 (Nepa Slide, Ripley Landslide, South Slide) and November 01 2021 (Red Hill Slide, North Slide). For each survey, UAV RTK base stations were established over stable GCPs (e.g., NP-02, Fig. 3). Geo-referenced image files captured during flights were stored on UAV memory cards, and then downloaded to cloud storage for later desktop processing.

Landslide of concern along the Thompson River valley railway corridor: flight plan footprints and DEMs generated from point clouds for the 2021 UAV surveys. Flight statistics generated using the Spexi Geospatial platform. Orthomosaic DSMs are shown in Fig. 3

Landslides of concern in the Thompson River valley with GCPs and UAV digital surface mosaics. a Location of RTK-GNSS surveyed landslides along the railway corridor. b Ripley Landslide, 15 GCPs established in 2016 (GCP-06 and GCP-12 are beyond the southern limit of landslide captured in photogram). c Nepa Slide, 19 GCPs established in 2021. d South Slide, 11 GCPs established in 2016 (GCP-06 to GCP-11 are beyond the northern limit of landslide captured in photogram); e North Slide, 13 GCPs established in 2019–2021
2 Method of Investigation
2.1 Remote Piloted Aircraft System Monitoring
Accurate and precise elevation models derived from UAV datasets serve as baseline references for rigorous landslide change-detection monitoring (Casagli et al. 2017; Rossi et al. 2018; Sestras et al. 2021). Repeat UAV surveys aim to capture changes in morphology of landslides in proximity to at-risk railway infrastructure (Fig. 2). To improve the understanding of landslide geomorphology and kinematics, and to benchmark UAV, we incorporated ground-based RTK-GNSS surveys and satellite InSAR displacement rates into the monitoring strategy for the Thompson River valley (Huntley et al. 2021a, b, c). Under ideal conditions, each year, monthly change-detection flights could be flown to catch seasonal changes in landslide displacement. In practice, poor weather conditions, limited human resources, and other unforeseen challenges result in less consistent UAV time-series datasets.
2.2 RPAS Landslide Inventory and Change-Detection
The GSC operated a DJI Phantom 4 between 2016 and 2021 (Huntley et al. 2021a). Although the 24-megapixel camera required flight altitudes < 30 m above ground level, longer flight times and more batteries, and generated a large number of images per flight plan, this UAV allowed flexible, inexpensive acquisition of aerial imagery. UAV surveys took between one day (Ripley Landslide and North Slide) to two days (South Slide and Nepa Slide) to execute, depending on areal extent of the flight plan, weather conditions, and time of day. Survey flight planning was conducted using Map Pilot (2016–2020), while Pix4D Mapper structure-from-motion (SfM) photogrammetric software enabled production of 2 cm-resolution DSMs from orthomosaiced aerial images. These DSMs were benchmarked with multi-year RTK-GNSS datasets (Fig. 3; Huntley et al. 2021a, b). This standardized process was time-consuming and data-intensive, requiring weeks to months of desktop processing to yield meaningful outputs.
Spexi Geospatial Inc. has developed a flight operations platform for autonomous UAV flight and data capture and back-end cloud processing, analytics, and rapid sharing capabilities that rivals the computing capabilities of commercial software, but is more cost-effective and intuitive to operate (www.fly.spexigeo.com [URL 2022]). Enabling automated data acquisition, processing, and rapid sharing capabilities through a standardized process meant faster response and faster results. The RPAS ensured that platform technology did not require hardware installations, and that cloud-hosted software was accessible on most desktop and mobile devices connected to the internet.
In 2021, the GSC began operating a DJI Phantom 4 Pro V2 with a 48-megapixel optical payload, and a DJI Matrice 300 with 35 mm lens; both with RTK capabilities. These upgrades allowed flight altitudes > 70 m above ground level, shorter flight times and fewer battery changes, and a smaller number of images and file sizes per flight plan. Flight plans for Ripley Landslide, South Slide, North Slide and Nepa Slide (Fig. 2) were set up using Spexi Geospatial and DJI platforms prior to fieldwork. Flight and photogrammetry variables included: altitude above ground level (72 m = 2 cm per pixel resolution); front and side overlaps for photograms (80% and 70%, respectively); flight direction (0–180°); speed (8 m s−1); and gimbal pitch (-90° for planform photograms). Contour maps (50 cm intervals), DEMs, DSMs, and orthomosaic photograms were readily generated from selected imagery and point clouds using the Spexi Geospatial platform (Figs. 2; and 3b–e), and exported into Global Mapper and ArcGIS software for further processing and change-detection monitoring. Useful platform review products included metadata reports on survey parameters, UAV and camera properties, camera locations with X, Y, and Z error estimates, point cloud parameters, and coordinate systems.
Change-detection monitoring focused on the most active landslides identified during inventory: Ripley Landslide (2016–2018) and North Slide (2019–2021). For Ripley Landslide, planimetric displacement was first mapped using co-relation processing (cf. Lucieer et al. 2014; Turner et al. 2015; Türk 2018) on hill-shaded UAV DSMs with 1.5 times exaggeration, and the sun at azimuth 310 and 45° altitude. Areas of vegetation and recent track ballast work on hill-shaded images were masked prior to processing to reduce the areas with substantial change not related to slide movement. Two images were created for E/W (X) and N/S (Y) displacement, while elevation changes (Z) were derived from the 2016 and 2018 DSMs. These values were added and squared to produce a single raster containing positive 3D displacement values, with larger values representing more displacement (Fig. 4; Huntley et al. 2021a).

Ripley Landslide surface displacement data derived from UAV overflights in 2016 and 2018 and multi-beam bathymetry data collected in 2018; plotted with RTK-GNSS (average annual rate for 2017, 2018 and 2019) and d-GNSS displacement data (November 2018 to June 2019, expressed as cm year−1). Stable d-GNSS unit—yellow dot; active d-GNSS unit—black and white dot; inactive d-GNSS—black dot. Active GCP—blue dot (modified from Huntley et al. 2021a)
For the North Slide, a more sophisticated, but less personnel time-consuming approach was possible with recent advances in cloud-based data storage and processing. Following the methodology of Gojcic et al. (2021), we employed a fully automated deformation analysis workflow that estimated 3D displacement vectors from point cloud data. Dense 3D displacement vector fields were estimated by searching for corresponding cloud points across DSM epochs at September 2019 and September 2021. The displacement patterns and magnitudes derived from UAV photogrammetry were evaluated with RTK-GNSS measurements of GCPs collected on the same days as the UAV surveys, and high-temporal resolution differential InSAR results from a RADARSAT Constellation Mission (RCM) time-series spanning August 2020 to September 2021.
2.3 RPAS Landslide Benchmarking
UAV photogrammetry provides cm-scale resolution geospatial data for geohazard mapping and landscape change-detection monitoring when benchmarked with RTK-GNSS measurements that provide the three-dimensional coordinates of moving points on landslides (e.g., Turner et al. 2015; Rossi et al. 2018). Prior to UAV surveys, a prime ground control point (GCP) was established on a stable post-glacial terrace near Black Canyon (Fig. 1b). The absolute position of this base station (WGS84 + NAD83 UTM Zone 10 E5614082.268 N619963.25, 390.648 m asl) was determined from a post-processed RINEX file using the Canadian Spatial Reference System Precise Point Positioning tool after a nine-hour occupation. The reported absolute positional accuracy was 0.8 cm horizontally and 1.3 cm vertically (95% Ʃ).
All RTK-GNSS surveys used the 2016 prime GCP coordinate values as the stable reference (Fig. 1b). Additional GCPs were established on, and adjacent to landslides of concern (Fig. 3a) using distinctively painted stable boulders and anthropogenic features. RTK-GNSS rover measurements at GCPs occupied for a minimum of two minutes at 1 Hz were reported with horizontal precisions of better than 2 cm and vertical precisions of 3 cm. All RTK-GNSS positioning data were reviewed, corrected for antenna laybacks, heights and edited for erroneous data points (Huntley et al. 2017, 2021a).
At each GCP station, ground observations were made of slope gradient, surficial materials, material texture, material thickness, slope morphology, moisture conditions, ongoing geomorphic processes, land cover, and nearby anthropogenic activities. These observations corroborated terrain and landslide classifications determined from optical satellite imagery and UAV photogrammetry.
2.4 RCM Landslide Benchmarking
RCM SAR datasets were examined to further refine the spatial and temporal distribution of landslide activity (Fig. 5a). Twelve RCM scenes from the end of August to early December, 2020, and twenty scenes from January to September 2021 were acquired during descending orbit passes (west-ranging) at a nominal ground resolution of 3 m, with an ideal revisit frequency of 4 days (Huntley et al. 2021b, c). RCM data was processed using GAMMA software following the methodology of Samsonov et al. and Dudley et al. SAR images were precisely aligned with a chosen master using normalized cross-correlation to yield SAR data cubes that could be analyzed spatially, or in time (Fig. 5b, step 1).

Differential InSAR analysis of RCM time-series results. a Extent of North Slide: (I) active slide toe (0.08 km2) with tension cracks, sparse vegetation and steep scarp faces (post 2000); (II) inactive slide main body and head scarp (0.55 km2) with sparse vegetation, and subdued scarp faces and slide blocks (ca. 1880); (III) inactive slide body (0.37 km2) with established vegetation ground cover, and subdued surface morphology (ancient, i.e., > 300 years before present); (IV) stable postglacial slopes and terraces supporting irrigated crops and cattle pasture. b Generalized InSAR processing steps followed in this paper (modified from Huntley et al. 2021b). c RCM interferogram, 2020/08/30–2020/09/11 (28 days). d RCM interferogram, 2020/08/14–2020/08/30 (16 days). e RCM interferogram, 2020/08/26–2020/08/30 (4 days). UAV-derived SFM-DSM overlain at 50% transparency for topographic context (modified from Huntley et al. 2021b, c)
InSAR processing and landslide change-detection benefited from an accurate high-resolution DEM to simulate and remove the topographic effects from the interferograms (Barret et al. 2012; Hu et al. 2019). Co-registered RCM stacks were benchmark geocoded with a 1 m-pixel resolution airborne LiDAR dataset, 1 arc-second resolution Advanced Land Observation Satellite (ALOS) World DEM data, UAV photogrammetry (2 cm pixel-resolution), and ground-based RTK-GNSS measurements (x, y, z ± 3 cm) (Fig. 5b, step 2; Fig. 6). DEMs were resampled and aligned with the multi-master interferograms to provide a height value for each SAR pixel. This helped to remove topographic signals in interferograms (Fig. 5b, steps 3 and 4), corrected orbit information as needed, and provided the relationship between SAR and map data used later for projecting results back into map space (Huntley et al. 2021b, c). Additional RCM processing created a robust time-series for LoS displacement of GCPs in 2021. RTK-GNSS measurement from 2019–2020 are shown for comparison (Fig. 6a).

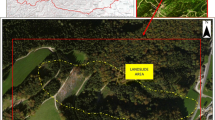
Geomorphology, change-detection monitoring, and at-risk railway infrastructure. a Extent of North Slide and footprint of UAV flight plans (2019, 2020, and 2021)—yellow line. b Plan view orthomosaic image of the “Solar Slump” showing distribution of terrace and landslide scarps, ephemeral gullies, and GCPs across the slide toe; with RTK-GNSS displacement vectors shown for NS-07, -08 and -09. c March to September 2021 UAV change detection results using cloud-processing solution M3C2 (after Gojcic et al. 2021), showing stable (green dots), possibly active (yellow dots), and active GCPs (red dots). d RCM change-detection results for January to September 2021, showing LoS vertical displacement of active GCPs. e Surficial geology and geomorphology in vicinity of subsidence and tension cracks encroaching on railway infrastructure: Ap-Fs—alluvial plain, disturbed by slow-moving slide; Cz-Fs—active colluvium, disturbed by slow-moving slide; GLb—glaciolacustrine blanket deposit (underlying Ap and Cz)
3 Results and Discussion
3.1 Ripley Landslide
At 0.089 km2, Ripley Landslide has the smallest flight plan footprint and areal extent (0.026 km2) (Fig. 2). Orthomosaic images and DSMs from 2016 to 2021 capture the active floodplain of Thompson River at ca. 260 m asl, and railway infrastructure crossing a gentle to steep slope (<12 to > 35°) with subdued translational-rotational slide blocks, tension cracks, closed depressions, and prominent head and side scarps. A glacial outwash terrace, with a surface elevation of 360 m asl, lies upslope and east of the active landslide. Fifteen permanent GCPs were established on stable boulders and anthropogenic features in 2016 (Fig. 3b). Nine earth material units are recognized from ground observations in the vicinity of GCPs, and on UAV imagery from 2016 to 2021 (Figs. 2 and 3b; Huntley et al. 2020). GCPs along the CN and CP tracks (RL-01, RL-04, RL-09 and RL-10) are established on cobble and boulder ballast up to 3 m thick. This anthropogenic layer overlies up to 25 m of glaciolacustrine clay and silt, and glacial boulder-rich diamicton (basal till) with shear surfaces 10–15 m below surface, resting on fractured andesite (Huntley et al. 2019a, b; Huntley et al. 2020).
Upslope of the tracks, unconsolidated sediment thickness decreases in the main slide body, with GCPs established on silt and sand-rich alluvial outwash, colluviated till and glaciofluvial gravels. Beneath RL-02, -08 and -11, this veneer covers up to 5 m of glaciolacustrine clay and silt draped on fractured andesite and rhyolite. Above the head scarp, GCPs are established shallow deposits (< 2 m thick) of colluvium and glaciofluvial outwash resting on igneous bedrock (RL-03, RL-05, RL-07, RL-15).
Change-detection monitoring
Repeat UAV surveys of Ripley Landslide in 2016 and 2018 characterized the spatial extent, magnitude and direction of landslide movement (Fig. 4). UAV photogrammetry reveals that over much of the slide body, movement is to the NW, except along the northern and southern flanks, where displacement is W. In contrast, channel scour along the slide toe and submerged bedrock bounding the landslide drives the body mass generally to the W.
Co-relation results from 2016–2018 show > 50 cm NW displacement of blocks along steep-dipping, retrogressive backscarps to the main slide body. This high value is consistent with the InSAR and GNSS monument data that captured significant displacement in 2017 (Bunce and Chadwick 2012; Huntley et al. 2021a). Displacement along the tracks reflects subsidence of the slide body (also expressed in deformation of the lock-block retaining wall), and the addition of ballast during routine safety maintenance. A zone of high displacement at the south flank of the slide foot is likely the consequence of toe-slope erosion as evidenced by the 15 m-deep scour pool mapped by the bathymetric surveys (Fig. 4). Across much of the foot slope however, 3D displacement values are lower, reflecting translational movement of the slide mass over sub-horizontal failure planes beneath the tracks and river.
Between 2017 and 2019, five GCPs recorded significant horizontal displacement on the landslide; RTK-GNSS measurement precision and accuracy discounted GCPs showing 3 cm or less movement. Upslope of the train tracks, on the main slide body, RL-10 recorded 8.7 cm of movement to the NNW. Disturbance during track maintenance accounted for the anomalous vector for RL-10 and slower displacement rate. Downslope of the tracks, across the slide toe, 11.3 cm of WNW displacement was measured at RL-02; RL-04 displaced 16.4 cm NW; and RL-09 moved 18.3 cm NW over the three-year observation period. The remaining GCPs were on stable portions of the slope, and adjacent to the landslide (Huntley et al. 2021a).
A new UAV and RTK-GNSS change-detection program was initiated in 2022 following significant slope modification during a stakeholder geotechnical investigation in 2020–2021 (Huntley et al. 2021c). The DEM and DSM captured in October 2021 (Figs. 2 and 3) will serve as the baseline for further RPAS change-detection monitoring at Ripley Landslide.
3.2 Nepa Slide
The flight plan footprint for Nepa Slide is 0.254 km2, with the disturbed land covering 0.136 km2. The 2021 orthomosaic image and DSM capturing the active floodplain of Thompson River at ca. 265 m asl, and railway infrastructure crossing a gentle toe slope (< 12°). The main translational slide body consists of sparsely vegetated hummocky blocks and closed depressions, flanked by prominent head and side scarps. A dendritic network of ephemeral channels, infilled with saturated silt and sand-rich alluvial outwash and organic sediments, and fed by springs and irrigation runoff, incises these blocks. A glacial outwash terrace with a, surface elevation of 390 m asl, lies upslope and east of the active landslide (Fig. 2).
Nineteen GCPs were installed on Nepa Slide in 2021 (Fig. 3c) to establish whether portions of the main body are reactivating. Below the CN and CP tracks, NP-09, -10 and -11 rest on cobble and boulder ballast up to 3 m thick. Like Ripley Landslide, this anthropogenic layer overlies > 10 m of fine-grained glaciolacustrine deposits and boulder-rich till with shear surfaces extending under Thompson River. GCPs on stable terrain north of the slide body (NP-01, NP-02, NP-03 and NP-04) sit on a wind-reworked alluvial silt and sand veneer draping boulder-rich till (< 3 m thick). These coarser surface units overlie glaciolacustrine silt and clay > 20 m in thickness. Along the southern flank, boulder-rich till (2–5 m thick), resting on fractured andesite and rhyolite, underlies NP-05, NP-06, NP-07 and NP-08. Across the main slide body and upslope of the tracks, GCPs (NP-12 to NP-19) sit on slide blocks comprising colluviated till and glaciofluvial sand and gravel (<5 m thick), overlying glaciolacustrine clay and silt beds (>10–15 m thick).
Change-detection monitoring
As part of the new UAV and RTK-GNSS change-detection program initiated in 2022, the orthophoto mosaic, DEM and DSM of Nepa Slide captured in October 2021 (Figs. 2; and 3) will serve as the baseline for further RPAS and InSAR change-detection monitoring.
3.3 Red Hill Slide
The Red Hill Slide flight plan footprint is 0.457 km2, with the 2021 orthomosaic image and DSM capturing a 0.298 km2 rotational-translational landslide with moderate to steep slopes between > 12° and < 37° and 145 m of relief (Fig. 2). Vegetation-free slide blocks with back scarps 5–20 m high are incised by a steep-sided ephemeral gully channeling irrigation and hillslope runoff. The stratigraphy exposed above the active river floodplain (ca. 265 m asl) comprises glaciolacustrine silt and clays, truncated and overlain till diamicton, sand and gravel outwash, and wind-reworked silt-rich alluvial terrace formed at 410 m asl.
Change-detection monitoring
The DEM and DSM of Red Hill Slide captured in November 2021 (Figs. 2; and 3) will serve as the baseline for further RPAS and InSAR change-detection monitoring.
3.4 South Slide (South Extension)
At 0.464 km2, the South Slide (South Extension) shares the largest flight plan footprint with the North Slide (Solar Slump) (Fig. 2). The “South Extension” has an approximate area of 0.144 km2. The October 2021 orthomosaic image and DSMs captures the active floodplain of Thompson River and tributary alluvial fan at ca. 265 m asl. Railway infrastructure crosses the slide toe with slopes ranging from > 12 to < 27°. The slide body consists of a northern portion with eroded slide blocks and closed depressions, relatively free of vegetation cover; and a southern extension showing no surficial evidence of movement (e.g., tension cracks, slide scarps). A glacial outwash terrace with a surface elevation of 400 m asl lies upslope and east of the active landslide.
Eleven GCPs were positioned across the headwall, toe slope and south extension of South Slide in 2016 (Fig. 3d). GCPs along the CN and CP tracks (SS-01, SS-02, SS-03, SS-04, and SS-09) are established on thick (>15 m) glaciolacustrine clay, silt and glacial boulder-rich diamicton (basal till). The toe slope is excavated to accommodate the CN and CP tracks, and draped in a cobble and boulder ballast up to 5 m thick. Upslope of the tracks, unconsolidated sediment thickness increases in the main slide body, with SS-05 to SS-11 established on silt and sand-rich alluvial outwash, overlying glaciolacustrine and till units > 25 m in thickness.
Change-detection monitoring
Although InSAR analysis delimits an extensive area of displacement between SS-01 and SS-05 (Fig. 1c), repeat RTK-GNSS surveys have not taken place since installation. The South Slide (South Extension) orthophoto mosaic, DEM and DSM, captured in October 2021 (Figs. 2, 3 and 6a), will serve as the baseline for further RPAS and InSAR change-detection monitoring.
3.5 North Slide (Solar Slump)
The merged mosaics and DSMs (Figs. 2, 3e and 6b) capture the baseline surface condition of the North Slide, long with the extent of bare earth and vegetation growth (e.g., grasses, shrubs, and trees). Metre-scale anthropogenic features (e.g., train tracks, signals bungalow, solar panel array) are resolvable in the orthophoto mosaic and DSM. Geomorphic features visible include: terraces graded to 340 m and 300 m asl, with steep river-cut scarps; ephemeral gullies draining the inactive nineteenth century slide surface; active slide blocks, scarps and tension cracks across the “Solar Slump”; and the toe bulge in the active floodplain of Thompson River (Figs. 2 and 3e).
In 2019, eleven permanent GCPs were installed across the North Slide toe slope; another station was added in 2020 on the floodplain toe slope bulge; and a thirteenth installed at the NW limit of the active toe slope in 2021 (Fig. 2d). On the Thompson River floodplain (ca. 270 m asl), a boulder veneer drapes back-tilted clay and silt beds beneath NS-12. Bedrock does not outcrop in the survey area. Inactive and active slide blocks with GCPs are incised by ephemeral gullies and by cut-bank erosion during high river stages (during summer months).
Over the slide toe, GCPs are established boulders resting on boulder-rich diamicton (basal till) and glaciofluvial sand and gravel outwash (5–10 m thick) overlying > 20 m of glaciolacustrine clay and silt. Landslide scarps across the “Solar Slump” form subparallel to the orientation of the river channel. In the northwest, cutbank erosion along a 200 m section of Thompson River has exposed and triggered a series of slumps in terraced glaciolacustrine and till deposits below 280 m asl. These small slumps (≤ 50 m2) are directly impacting railway infrastructure (Fig. 6b, e) and contributing to slope unloading. Landslide scarps follow the arc of relict back-rotated slide blocks (GCPs NS-05, NS-06, NS-10 and NS-11), and increase in size and activity toward the river (GCPs NS-07, NS-08 and NS-09). Tension cracks are extrapolated beneath railway ballast close to the solar panel array and signals bungalow (between GCPs NS-04, NS-05 and NS-13).
Southeast and upslope of the CP tracks, retrogressive translational back-rotated slide blocks and scarps from the 1880 landslide are now subdued features due to 140 years of wind deflation, soil creep, and surface runoff. Slopes ≥ 12° are draped in a veneer of colluviated till, glaciofluvial outwash and glaciolacustrine sediments. The historical landslide and active “Solar Slump” are gullied by ephemeral streams that drain to a coarse alluvial fan prograding into Thompson River along the western margin of the toe slope (Fig. 6b).
Change-detection monitoring
RTK-GNSS measurement precision and accuracy discounts points showing 3 cm or less movement (NS-01, NS-02, NS-03, NS-04, NS-05, N-06, N-10 and NS-11). Those GCPs with annual differences of > 3 cm were considered robust measurements. Between 2019 and 2020, NS-07, NS-08 and NS-09 all showed displacement vectors to the NNW (Fig. 6b). Maximum annual displacement values of 15.77 cm year−1 (NS-08) and 20.40 cm year−1 (NS-07). Significantly, the displacement vectors indicate movement toward the scour pools lying adjacent to the “Solar Slump” (Figs. 2 and 5a).
Aligning the GCPs and manually picking tie points to improve point cloud registration between the two surveys significantly enhanced the quality of the M3C2 point cloud comparison results (Fig. 6c). A qualitative assessment of preliminary results of point cloud-based change-detection monitoring for the North Slide is presented here. An area of 436 m2 with displacement values > 5 cm between September 2019 and September 2021 lies NW of the CP track (NS-07, NS-08 and NS-13), extending onto the Thompson River floodplain (NS-12). Individual slide block surfaces are resolved, with RTK-GNSS measurement at NS-07 recording 10 cm of NW displacement between March and September 2021. Localized displacement SW of NS-10 records the formation of colluvial cones by a small debris fall along the river embankment. Significantly, UAV change-detection photogrammetry shows the extent of encroachment by the active portion of the landslide on railway infrastructure (ballast and tracks; Fig. 6e).
The 2020 RCM InSAR results reveal severe deformation at the North Slide “Solar Slump” from the end of August to middle September (Fig. 5c–e). Several fringes indicate movement of approximately 2–5 cm over 28-day (Fig. 5c) and 16-day periods (Fig. 5d), indicating a rapid and complex deformation pattern in the most affected zones. The 4-day interferogram (Fig. 5e) shows nearly a full fringe cycle, indicating a rapid and complex deformation pattern on shorter time scales. Maximum deformation over this 4-day period is estimated to be ~ 2 cm.
We are currently developing a robust multi-year RCM time-series. The January to May 2021 interval is briefly discussed here, but the aim is to extend coverage on either side of this time-series (Rotheram-Clarke et al. In prep.). The spatial extent captured by RCM showing the cumulative deformation from January 5, 2021 to May 9, 2021 (Fig. 6d) is very similar to that seen with the UAV imagery. The colour stretch is ± 5 cm, indicating measurement of approximately 5–6 cm of line-of sight deformation at NS-07 and NS-08. There is also uplift between NS-07 and NS-12, which is where back-tilted clay-silt beds are exposed in the active floodplain (Huntley et al. 2021b). Research efforts are now directed at comparing the two time-series and converting satellite LoS displacements to correspond with movement vectors derived from UAV and RTK-GNSS datasets.
4 Conclusions and Evaluation
Proactive landslide disaster-risk management requires knowledge of the timing and magnitude of ground displacement events. NRCAN-GSC, through IPL Project 202, provides foundational geospatial information on landslides and other geohazards threatening natural resources, national socioeconomic infrastructure, communities and public safety.
This paper demonstrates the investigative capacity of a RPAS for landslide monitoring along the Canada’s national railway transportation corridor. UAV photogrammetric techniques allow the representation of large surfaces with dense spatial sampling. Orthomosaic 3D time-series offer clear advantages with respect to InSAR time-series analysis providing only LoS displacement measurements over large areas, and RTK-GNSS surveys of GCPs which provide data that are spatially accurate, but necessarily limited to a small number of control points. UAV photogrammetry and RTK-GNSS surveys show landslides have a significant motion that is only partly captured by satellite InSAR monitoring. This is a clear demonstration of a limitation in east–west-up-down sensitive InSAR, since failing slopes are largely moving NW or SE, so a significant amount of movement is likely not recognized by satellite monitoring alone.
The RPAS presented in this paper generates high spatial resolution epochal geo-coded imagery suitable for landslide disaster-risk management. UAV photogrammetry, when benchmarked with RTK-GNSS, satellite InSAR, and other geospatial and temporal datasets will help stakeholders develop a more resilient railway national transportation network able to meet Canada’s future socioeconomic needs, while ensuring protection of the environment and resource-based communities from natural disasters related to extreme weather events and climate change.
4.1 RPAS Evaluation
We demonstrate the Spexi Geospatial RPAS allows trained UAV pilots to quickly and easily capture imagery, and transfer processed data to stakeholders (e.g., government agencies, railway industry, remote communities) in a timely manner. The time elapsed from flight request to data delivery is comparable to commercial SfM applications. The RPAS is capable of simultaneous deployment on multiple landslides > 3 km2 allowing for more productive fieldwork. Geospatial datasets (orthophoto mosaics, DEMs and DSMs) have processed X, Y, Z accuracies of 3 to 5 cm: comparable to RTK-GNSS and InSAR measurements. Resulting datasets from the collected and processed imagery with a pixel resolution of 2.5 cm can easily resolve small surface features (e.g., GCPs, railway ties, bedrock fractures and tension cracks). Orthophoto mosaics, DEMs and DSMs captured in 2021 (Figs. 2 and 3) will serve as the baseline for further RPAS landslide change-detection monitoring along the national railway corridor in the Thompson River valley, and elsewhere across Canada.
Across NRCAN (and other Federal Agencies), there are numerous applications for UAV photogrammetry (Fig. 7). In addition to monitoring landslides along the national railway corridors, the RPAS presented in this paper has applications for modelling tsunami run-up in coastal communities, mapping active faults, monitoring volcanic hazards, recognizing geohazards along pipelines and power transmission right-of-ways, delineating permafrost deterioration in northern regions, and for deployment during bedrock mapping traverses.

UAV applications broadly relevant to mandates of NRCAN and other government departments (e.g., Department of National Defence; Environment and Climate Change Canada; Innovation, Science and Economic Development Canada; National Research Council Canada; Parks Canada; Public Safety Canada; Royal Canadian Mounted Police; Transportation Safety Board; Fisheries and Oceans Canada; Infrastructure Canada; Canadian Coast Guard; Canadian Police College; and Canadian Transportation Agency)
References
Barrett B, Whelan P, Dwyer N (2012) The use of C- and L-band Repeat-Pass Interferometric SAR coherence for soil moisture change detection in vegetated areas. Open Remote Sens J 5:37–53. https://doi.org/10.2174/1875413901205010037
Booth A, Lamb M, Avouac J-P, Delacourt C (2013) Landslide velocity, thickness, and rheology from remote sensing: La Clapière landslide, France. Geophys Res Lett 40:4299–4304. https://doi.org/10.1002/grl.50828
Bunce C, Chadwick I (2012) GPS monitoring of a landslide for railways. In: Landslides and engineered slopes—protecting society through improved understanding, pp 1373–1379
Casagli N, Frodella W, Morelli S, Tofani V, Ciampalini A, Intrieri E, Raspini F, Rossi G, Tanteri L, Lu P (2017) Spaceborne, UAV and ground-based remote sensing techniques for landslide mapping, monitoring and early warning. Geoenvironmental Disasters 4(9):23. https://doi.org/10.1186/s40677-017-0073-1
Clague J, Evans S (2003) Geologic framework for large historic landslides in Thompson River valley, British Columbia. Environ Eng Geosci 9:201–212
Gojcic Z, Schmid L, Wieser A (2021) Dense 3D displacement vector fields for point could-based landslide monitoring. Landslides 18:3821–3832. https://doi.org/10.1007/s10346-021-01761-y
Handwerger A, Booth A, Huang M, Fielding E (2021) J Geophys Research, Earth Surf 126:21. https://doi.org/10.1029/2020JF005898
Hendry M, Macciotta R, Martin D (2015) Effect of Thompson River elevation on velocity and instability of Ripley Slide. Can Geotech J 52(3):257–267
Holmes J, Chambers J, Meldrum P, Wilkinson B, Williamson P, Huntley D, Sattler K, Elwood D, Sivakumar V, Reeves H, Donohue S (2020) 4-Dimensional electrical resistivity tomography for continuous, near-real time monitoring of a landslide affecting transport infrastructure in British Columbia, Canada. Near Surface Geophys 15. https://doi.org/10.1002/nsg.12102
Hu X, Bürgmann R, Lu Z, Handwerger A, Wang T, Miao R (2019) Mobility, thickness, and hydraulic diffusivity of the slow-moving Monroe Landslide in California revealed by L-band satellite radar interferometry. J Geophys Res Solid Earth 124:7504–7518. https://doi.org/10.1029/2019JB017560
Huntley D, Bobrowsky P, Zhang Q, Zhang X, Lv Z (2017) Fibre bragg grating and brillouin optical time domain reflectometry monitoring manual for the Ripley landslide, near Ashcroft, British Columbia. GSC Open File 8258:66
Huntley D, Bobrowsky P, Hendry M, Macciotta R, Best M (2019a) Multi-technique geophysical investigation of a very slow-moving landslide near Ashcroft, British Columbia, Canada. J Environ Eng Geophys 24(1):85–108. https://doi.org/10.2113/JEEG24.1.87
Huntley D, Bobrowsky P, Hendry M, Macciotta R, Elwood D, Sattler K, Chambers J, Meldrum P (2019b) Application of multi-dimensional electrical resistivity tomography datasets to investigate a very slow-moving landslide near Ashcroft, British Columbia, Canada. Landslides 16:1033–1042. https://doi.org/10.1007/s10346-019-01147-1
Huntley D, Holmes J, Bobrowsky P, Chambers J, Meldrum P, Wilkinson P, Elwood D, Sattler K, Hendry M, Macciotta R (2020) Hydrogeological and geophysical properties of the very slow-moving Ripley Landslide, Thompson River valley, British Columbia. Can J Earth Sci 21. https://doi.org/10.1139/cjes-2019-0187
Huntley D, Bobrowsky P, MacLeod R, Cocking R, Joseph J, Rotheram-Clarke D (2021a) Ensuring resilient socio-economic infrastructure: field testing innovative differential GNSS-InSAR-UAV monitoring technologies in mountainous terrain near Ashcroft, British Columbia, Canada. J Mountain Sci 18(1):1–20. https://doi.org/10.1007/s11629-020-6552-y
Huntley D, Rotheram-Clarke D, Pon A, Tomaszewicz A, Leighton J, Cocking R, Joseph J (2021b) Benchmarked RADARSAT-2, SENTINEL-1 and RADARSAT CONSTELLATION MISSION change detection monitoring at North Slide, Thompson River valley, British Columbia: implications for a landslide-resilient national railway network. Can J Remote Sens. https://doi.org/10.1080/07038992.2021.1937968
Huntley D, Rotheram-Clarke D, Cocking R, Joseph J, Bobrowsky, P (2021c) Understanding Plateau and Prairie Landslides: annual report on landslide research in the Thompson River valley, British Columbia, and the Assiniboine River valley, Manitoba-Saskatchewan (2020–2021c to 2021c–2022); Geological Survey of Canada, Open File 8838, 73 pages
Journault J, Macciotta R, Hendry M, Charbonneau F, Huntley D, Bobrowsky P (2018) Measuring displacements of the Thompson River valley landslides, south of Ashcroft, B.C., Canada, using satellite InSAR. Landslides 15(4):621–636. https://doi.org/10.1007/s10346-017-0900-1
Lucieer A, de Jong S, Turner D (2014) Mapping landslide displacements using structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog Phys Geogr 38(1):97–116
Macciotta, R, Hendry, M, Martin, D, Elwood, D, Lan, H, Huntley, D, Bobrowsky, P, Sladen, W, Bunce C, Choi, E and Edwards, T (2014) Monitoring of the Ripley Slide in the Thompson River Valley, B.C. Geohazards 6 Symposium, Proceedings Volume, Kingston, Ontario, Canada
Rossi G, Tanteri L, Tofani V, Vannocci P, Moretti S, Casagli N (2018) Multitemporal UAV surveys for landslide mapping and characterization. Landslides 15:1045–1052. https://doi.org/10.1007/s10346-018-0978-0
Schafer M, Macciotta R, Hendry M, Martin D, Bobrowsky P, Huntley D, Bunce C, Edwards T (2015) Instrumenting and monitoring a slow moving landslide. GeoQuebec 2015 Paper, 7 p
Sestras P, Bilaşco S, Roşca S, Dudic B, Hyas A, Spalević V (2021) Geodetic and UAV monitoring in the sustainable management of shallow landslides and erosion of a susceptible. Remote Sens 13:28. 10.3390
Stanton R (1898) The great land-slides on the Canadian Pacific Railway in British Columbia. Proc Civil Eng 132:1–48
Türk T (2018) Determination of mass movements in slow-moving landslides by the Cosi-Corr method. Geomatics, Natural Hazards, Risk 9(1):325–336. https://doi.org/10.1080/19475705.2018.1435564
Turner D, Lucieer A, de Jong S (2015) Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens 7:1736–1757. https://doi.org/10.3390/rs70201736
Acknowledgements
The Government of Canada, through the Ministry of Transport and Ministry of Natural Resources, is funding field-based landslide research in the Thompson River valley, BC, and elsewhere across Canada. The authors wish to acknowledge the support of Danny Wong (Canadian Pacific Railways, Calgary, Alberta) and Trevor Evans (Canadian National Railways, Kamloops, British Columbia). Anonymous reviewers improved an early version of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Huntley, D. et al. (2023). Scalable Platform for UAV Flight Operations, Data Capture, Cloud Processing and Image Rendering of Landslide Hazards and Surface Change Detection for Disaster-Risk Reduction. In: Alcántara-Ayala, I., et al. Progress in Landslide Research and Technology, Volume 1 Issue 2, 2022. Progress in Landslide Research and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-18471-0_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-18471-0_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-18470-3
Online ISBN: 978-3-031-18471-0
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)